Вот концептуальная схема, созданная с помощью ИИ — хотя пропорции не точны, она визуально передает основную идею.
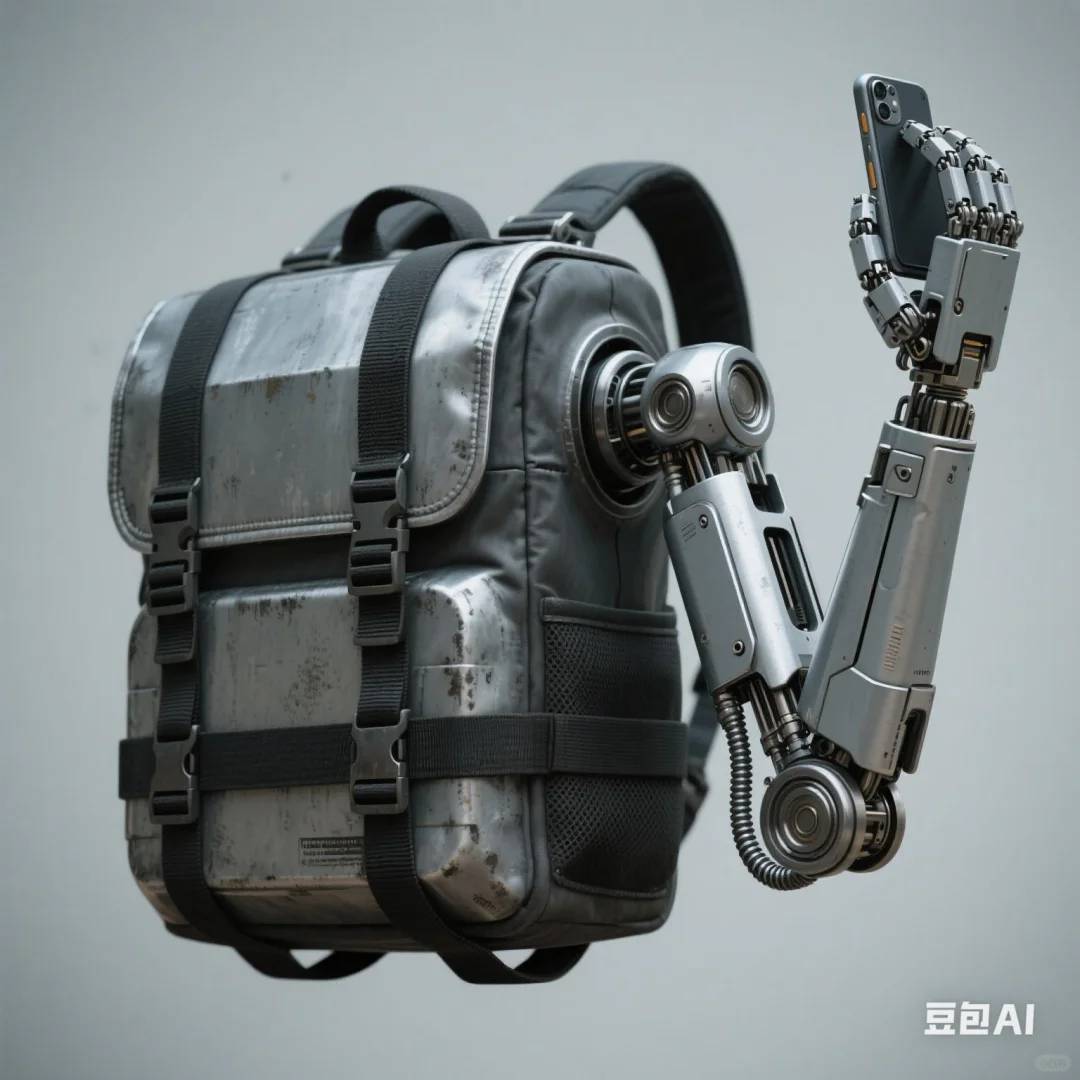
Моя концепция механической руки, доступной для людей с ограниченными возможностями, сосредоточена на простоте: всего три регулируемых размера (большой, средний, малый) с тонкой настройкой длины через модульный дизайн для идеального соответствия потребностям каждого пользователя.

Традиционные бионические руки, крепящиеся на основе сокетов, сталкиваются с множеством проблем. Они требуют индивидуальной подгонки в зависимости от уровня ампутации, заставляя пользователей вставлять остаточные конечности в жесткие сокеты. Это часто приводит к длительному дискомфорту из-за накопления пота и трения кожи. Хуже того, при подъеме тяжестей вертикальная сила оказывает давление на контактную поверхность остаточной конечности. Поскольку эти руки просто надеваются, существует риск их отсоединения во время операций с тяжелыми нагрузками.
Мой революционный подход акцентируется на доступности и практической функциональности. Для большинства случаев ампутации (кроме частичной потери кисти), мы полностью устранили бы крепление на сокете. Вместо этого механическая рука образует полную структуру конечности, закрепленную на металлической раме, закрепленной на спине. Контроллер системы и аккумулятор будут размещены в противовесном рюкзаке, который будет закреплен удобными ремнями.
Это освобождает остаточную конечность от ограничений, позволяя использовать механическое соединение для распределения нагрузки, при этом ЭМГ-сенсоры обеспечивают интуитивное управление.
Рука, закрепленная на рюкзаке, будет реагировать динамически на естественные движения тела — отслеживать движения, вращения и сокращения мышц остаточной конечности для плавной работы. Мы могли бы улучшить функциональность, добавив встроенную камеру для распознавания объектов, что позволит принимать автоматические решения о захвате.
Для повышения контроля пользователи могут надеть умственную перчатку на функциональную руку. Это позволит механической руке зеркально повторять движения либо симметрично (например, поднятие штанги), либо через зеркальную координацию.
Если вес станет проблемой, рюкзак может эволюционировать в гибридный экзоскелет, redistributing нагрузку по всему телу. Что вы думаете об этом прорывном концепте, специалисты по робототехнике?
Comments are closed.