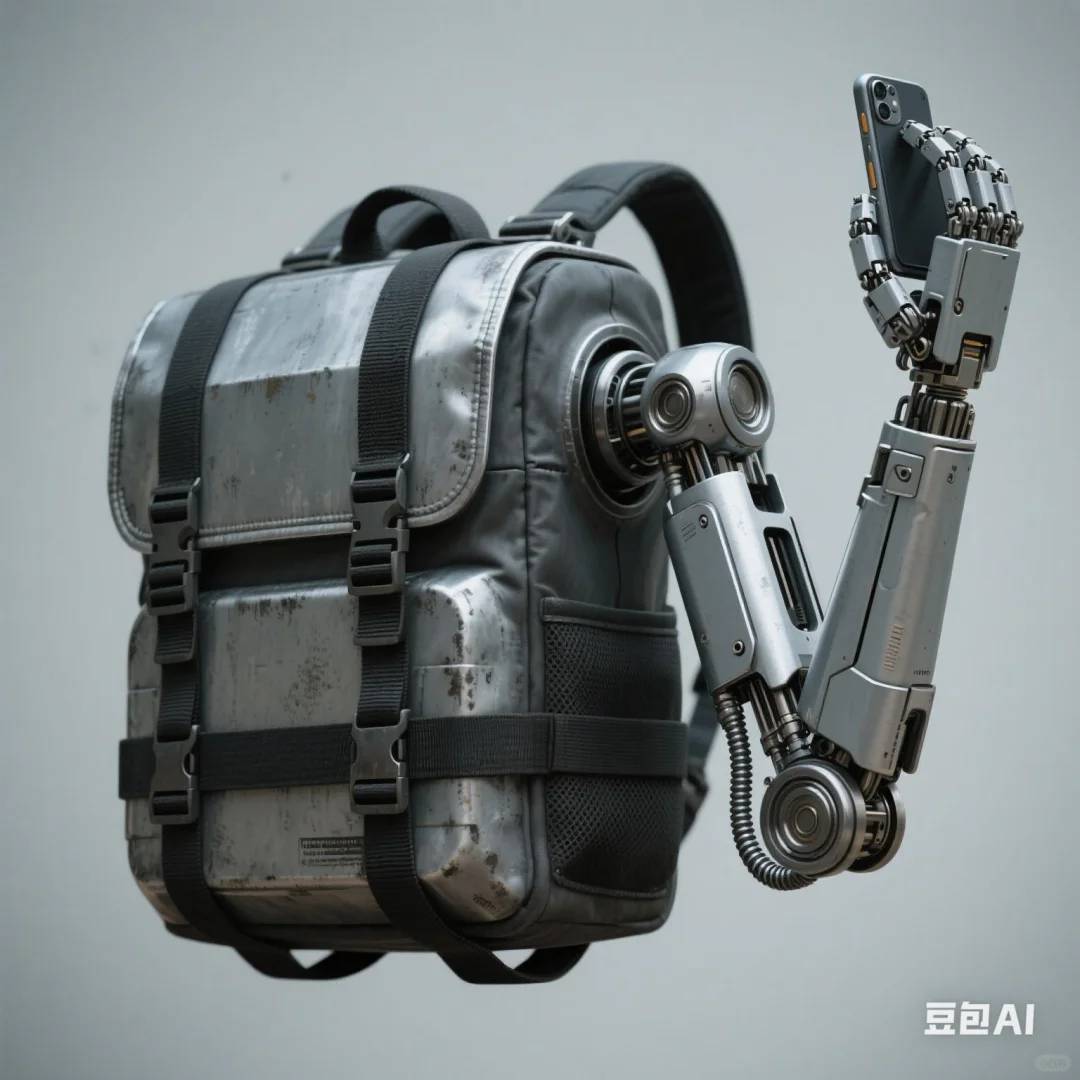
以下はAI生成の概念図です。正確な比率ではありませんが、核心的なアイデアを視覚的に捉えています。
この障害者向け機械腕に対する私のビジョンはシンプルさに焦点を当てています:大、中、小の3つの調整可能なサイズに加え、モジュール式デザインによる微調整で、各ユーザーのニーズに完璧に一致させる長さカスタマイズが可能です。

従来のソケット装着型バイオニック腕には複数の課題があります。切断レベルに基づいたカスタムフィットが必要であり、ユーザーは残存肢を硬いソケットに挿入しなければなりません。これが原因で、汗の蓄積や皮膚との摩擦から長期的な不快感が生じることがあります。さらに悪化すると、重い物を持ち上げる際に下向きの力が残存肢の接触面に負荷をかけます。これらの腕は単に滑り込むだけなので、重い荷物を扱う際には脱落するリスクもあります。
私の革新的なアプローチでは、費用対効果と実用性を最優先しています。大部分の切断ケース(部分的な手の損失を除く)では、ソケットの取り付けを完全に廃止します。代わりに、機械腕は背中に取り付けられた金属フレームに固定された完全な肢構造になります。システムのコントローラーとバッテリーは、快適な体にフィットするバックパック内に収納され、体に固定されるストラップでしっかりと固定されます。
これにより、残存肢が拘束されることなく、機械的な連動で負荷を共有でき、EMGセンサーによって直感的な制御が可能になります。
バックパックに取り付けられた腕は、自然な体の動きにダイナミックに対応します—残存肢の振り、回転、筋肉の収縮を追跡し、スムーズな操作を実現します。さらに、物体認識機能を備えた統合カメラを搭載することで、自動的な把持決定を強化できます。
より高度な制御を求める場合、ユーザーは機能的な手にスマートグローブを装着できます。これにより、機械腕は対称的な動き(例えばバーベルリフト)や鏡像協調で動きを反映させることができます。
重量が問題になる場合、バックパックはエクソスケルトンと融合して進化し、体全体に負荷を再分配することができます。ロボティクスの専門家たち—この革新的なコンセプトについてどう思いますか?
Comments are closed.