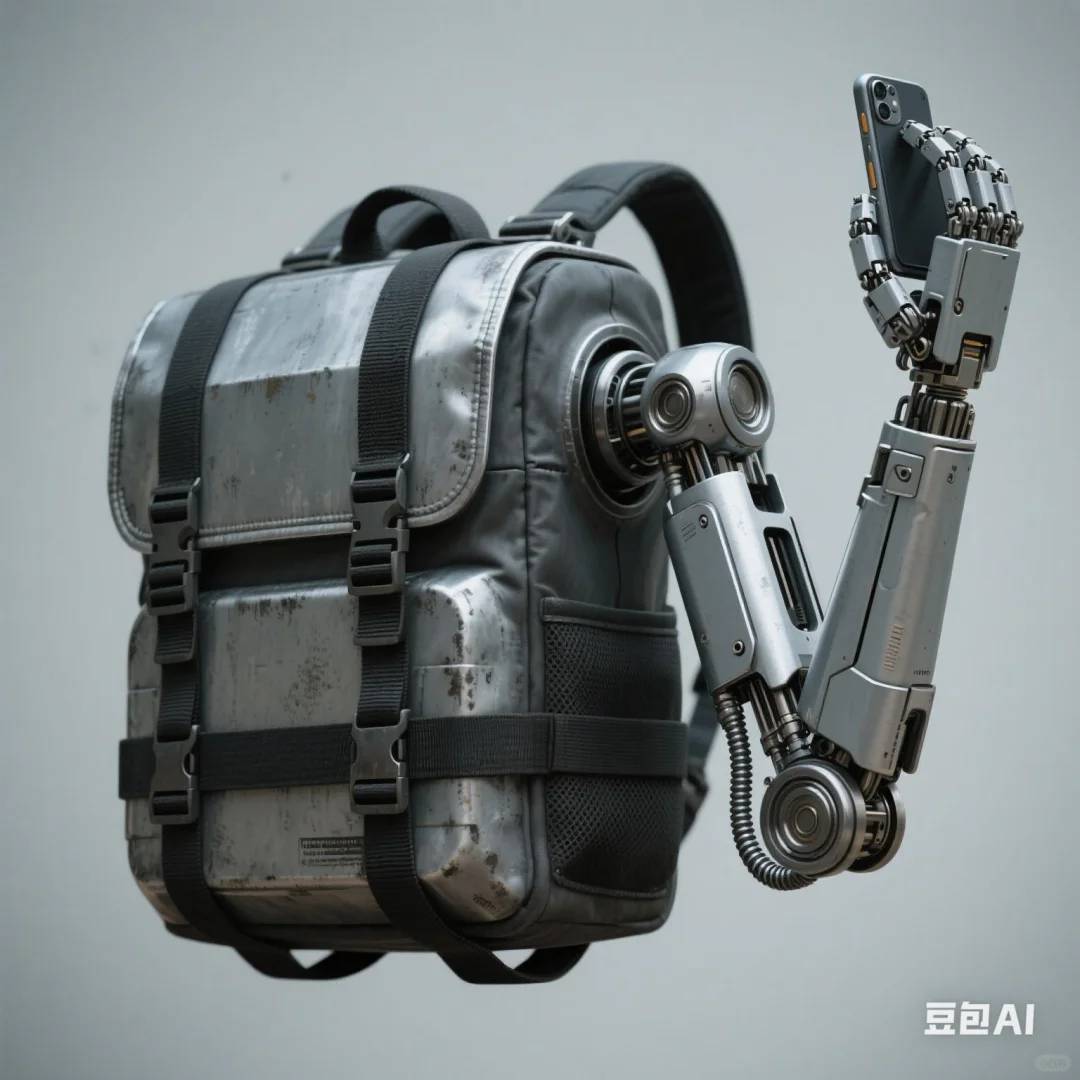
Voici un diagramme conceptuel généré par une IA—bien que les proportions ne soient pas exactes, il capture l'idée centrale visuellement.
Ma vision pour cette prothèse mécanique adaptée aux personnes handicapées repose sur la simplicité : trois tailles ajustables (grande, moyenne, petite) avec un ajustement précis de la longueur grâce à son design modulaire pour correspondre parfaitement aux besoins de chaque utilisateur.

Les bras bioniques traditionnels montés sur des sockets rencontrent plusieurs défis. Ils nécessitent des ajustements personnalisés en fonction du niveau d'amputation, obligeant les utilisateurs à insérer leurs membres résiduels dans des sockets rigides. Cela entraîne souvent un inconfort à long terme causé par la sueur accumulée et le frottement de la peau. Pire encore, lorsqu'ils soulèvent des objets lourds, la force vers le bas exerce une pression sur la zone de contact du membre résiduel. Comme ces bras glissent simplement dessus, ils risquent de se détacher pendant les opérations sous charge élevée.
Mon approche révolutionnaire priorise l'accessibilité et la fonctionnalité pratique. Pour la plupart des cas d'amputation (à l'exception des pertes de main partielle), nous éliminerions complètement l'attachement au socket. À la place, le bras mécanique formerait une structure complète de membre ancrée à un cadre métallique fixé dans le dos. Le système de contrôle et la batterie se logeraient dans un sac à dos contrebalancé, sécurisé par des sangles confortables.
Cela libère le membre résiduel de sa contrainte tout en permettant un partage de charge via des liaisons mécaniques, avec des capteurs EMG pour un contrôle intuitif.
Le bras monté sur le sac à dos répondrait dynamiquement aux mouvements naturels du corps—suivant les mouvements de balancement, les rotations et les contractions musculaires du membre résiduel pour une opération fluide. Nous pourrions améliorer la fonctionnalité avec une caméra intégrée pour la reconnaissance d'objets, permettant des décisions automatiques de saisie.
Pour un contrôle accru, les utilisateurs pourraient porter un gant intelligent sur leur main fonctionnelle. Cela permettrait au bras mécanique de refléter les mouvements soit de manière symétrique (comme pour soulever des haltères), soit via une coordination miroir.
En cas de problème de poids, le sac à dos pourrait évoluer vers un hybride d'exosquelette, redistribuant les charges sur tout le corps. Cherchons-nous des spécialistes en robotique—que pensez-vous de ce concept novateur ?
C’est vraiment impressionnant de voir à quel point cette prothèse modulaire est conçue pour s’adapter aux besoins individuels. J’espère que cette solution simplifiée pourra devenir accessible à un plus grand nombre de personnes dans le besoin.