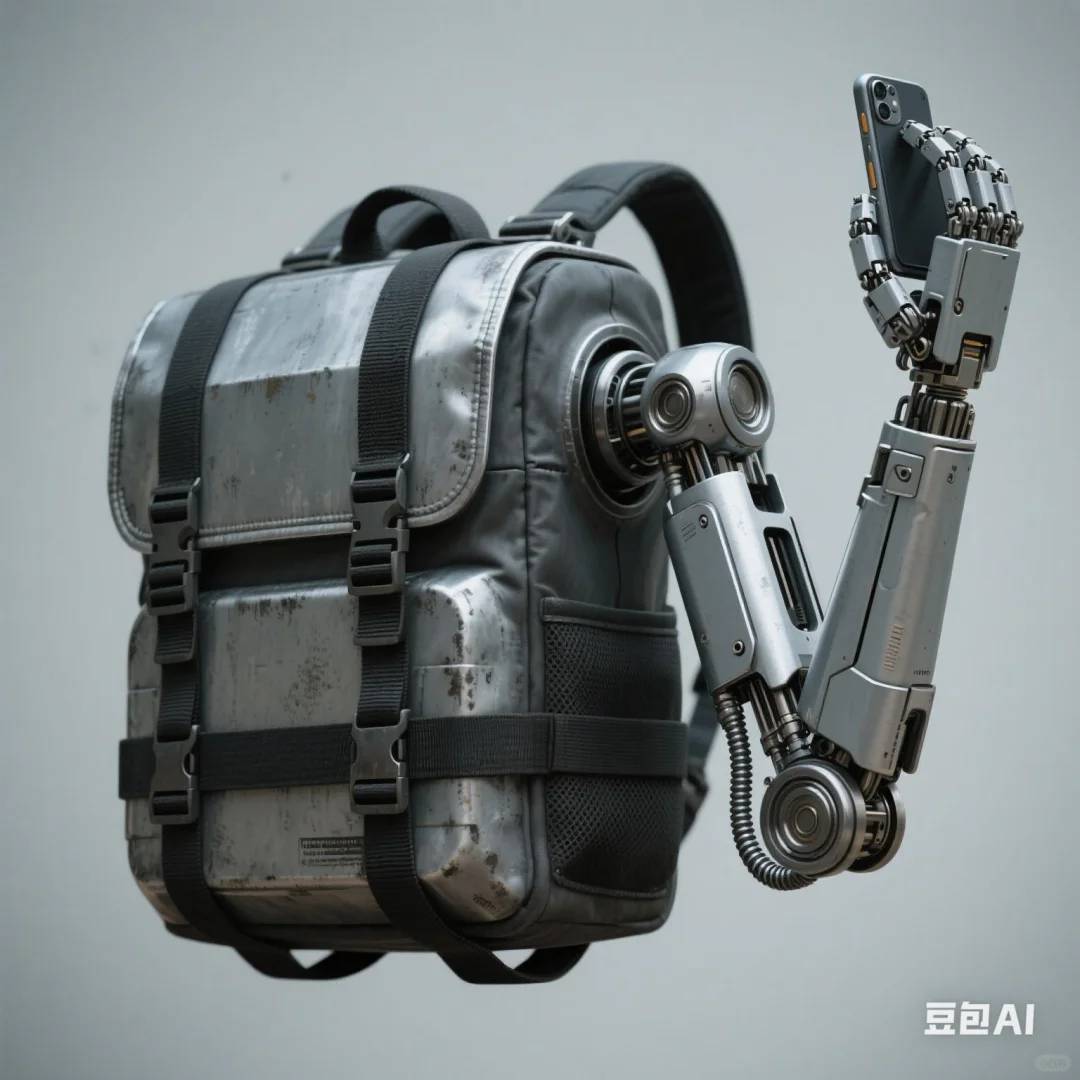
Hier ist ein von einer KI generiertes konzeptionelles Diagramm – obwohl die Proportionen nicht exakt sind, vermittelt es das Kernprinzip visuell.
Meine Vision für diesen behindertengerechten mechanischen Arm konzentriert sich auf Einfachheit: lediglich drei einstellbare Größen (groß, mittel, klein) mit feingestellter Längenanpassung durch das modulare Design, um den Bedürfnissen jedes Nutzers perfekt anzupassen.

Traditionelle, an der Gliedmaße befestigte bionische Arme haben mehrere Herausforderungen. Sie erfordern individuelle Anfertigungen basierend auf dem Amputationsgrad, wodurch Nutzer verbleibende Gliedmaßen in starre Gehäuse einfügen müssen. Dies führt oft zu langfristiger Unannehmlichkeit durch Schweißansammlungen und Hautreibung. Noch schlimmer ist, dass beim Heben schwerer Gegenstände der nach unten gerichtete Kraftaufwand die Kontaktfläche des verbliebenen Gliedes belastet. Da diese Arme einfach nur draufgesetzt werden, besteht bei Lastoperationen das Risiko, dass sie abrutschen.
Meine revolutionäre Methode priorisiert Preisgünstigkeit und reale Funktionalität. Für die meisten Amputationsfälle (außer bei partieller Handentfernung) würden wir die Gehäuseverbindung komplett eliminieren. Stattdessen würde der mechanische Arm eine vollständige Gliedmaßenstruktur bilden, die an einem am Rücken montierten Metallgestell befestigt ist. Der Systemcontroller und die Batterie könnten in einem ausgleichenden Rucksack untergebracht werden, der mit bequemen Körpergurten gesichert ist.
Dadurch wird der verbliebene Gliedarm aus seiner Begrenzung befreit, während gleichzeitig mechanische Verbindungen zur Lastverteilung ermöglicht werden, wobei EMG-Sensoren intuitive Kontrolle ermöglichen.
Der am Rucksack montierte Arm würde dynamisch auf natürliche Körpermovements reagieren – verbleibende Gliedmaßenbewegungen, Drehungen und Muskelkontraktionen nachverfolgen, um eine nahtlose Bedienung zu ermöglichen. Wir könnten die Funktionalität durch eine integrierte Kamera für Objekterkennung verbessern, um automatische Greifentscheidungen zu ermöglichen.
Für eine verbesserte Kontrolle könnte der Nutzer ein intelligentes Handschuh an seiner funktionstüchtigen Hand tragen. Dadurch könnte der mechanische Arm Bewegungen entweder symmetrisch (wie bei Barbell-Heben) oder durch spiegelbildliche Koordination nachahmen.
Wird Gewicht zu einem Problem, könnte der Rucksack sich in eine Hybrid-Exoskelett-Struktur entwickeln, um Lasten über den ganzen Körper zu verteilen. Was halten Sie von diesem bahnbrechenden Konzept, Spezialisten für Robotik?
Das klingt nach einem wirklich innovativen Ansatz für bionische Arme. Die Modulardesign-Idee mit den drei Größen scheint eine gute Lösung für individuelle Anpassungen zu sein. Hoffentlich wird diese Technologie in Zukunft für mehr Menschen zugänglich gemacht.