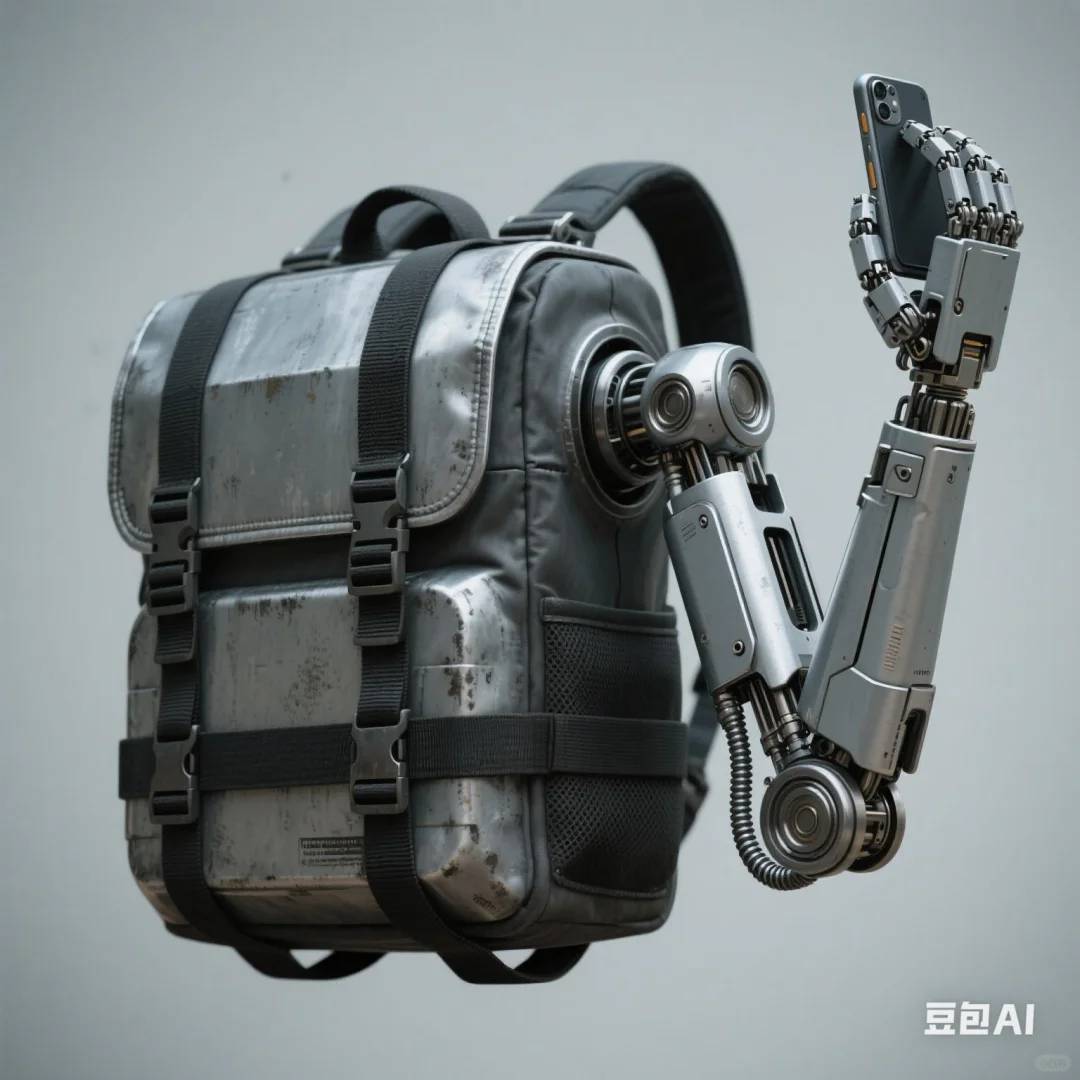
هذا هو الرسم التخطيطي المفاهيمي الذي تم إنشاؤه بواسطة الذكاء الاصطناعي—على الرغم من أن النسب ليست دقيقة تمامًا، إلا أنه ي捕ِّل الفكرة الأساسية بصريًا.
رؤيتي لهذه الذراع الميكانيكية الصديقة للإعاقة تركز على البساطة: مجرد ثلاث أحجام قابلة للتعديل (كبيرة، متوسطة، صغيرة) مع تعديل دقيق في الطول من خلال تصميمها المودوليكي لتتناسب بشكل مثالي مع احتياجات كل مستخدم.

تعاني الأذرعة البينية التقليدية المثبتة بالجذع من تحديات متعددة. فهي تتطلب تخصيصًا بناءً على مستوى البتر، مما يجعل المستخدمين مضطرين لإدخال الأطراف المتبقية في أغلفة صلبة. غالبًا ما يؤدي ذلك إلى عدم الراحة طويل الأمد بسبب تراكم العرق واحتكاك الجلد. وأسوأ من ذلك، عند رفع الأوزان الثقيلة، يضغط القوة العمودية على منطقة الاتصال بالأطراف المتبقية. نظرًا لأن هذه الأذرعة تُلبس فقط، فهناك خطر انفصالها أثناء العمليات التي تتطلب أوزانًا ثقيلة.
approach الثوري يركز على التكلفة وفعالية الاستخدام في العالم الحقيقي. بالنسبة لأغلب حالات البتر (باستثناء فقدان اليد الجزئي)، سنقوم بإلغاء الارتباط بالغطاء تماماً. بدلاً من ذلك، ستكون الذراع الميكانيكية هي الهيكل الكامل للطرف المزروع مربوطاً بهيكل معدني مثبت على الظهر. سيحتوي نظام التحكم والبطارية على حقيبة ظهر متوازنة الوزن، مثبتة بحزام جسم مريح.
هذا يحرر الطرف المتبقي من القيود بينما يسمح بالربط الميكانيكي لمشاركة الحمل، مع استخدام مستشعرات EMG للتحكم بطريقة فطرية.
ستتفاعل الذراع المثبتة على الحقيبة بشكل ديناميكي مع حركات الجسم الطبيعية—تتبع حركات الطرف المتبقي، الدورانات، وانقباضات العضلات لتحقيق تشغيل سلس. يمكننا تحسين الوظائف بإضافة كاميرا مدمجة لتمييز الأجسام، مما يمكِّن من اتخاذ قرارات التمسك تلقائيًا.
للتحكم المُحسَّن، يمكن للمستخدمين ارتداء قفاز ذكي على اليد الوظيفية. هذا سيسمح للذراع الميكانيكية بتكرار الحركات إما بشكل متماثل (مثل رفع الأوزان) أو من خلال التنسيق المتماثل.
في حال أصبح الوزن مشكلة، يمكن تطور الحقيبة إلى هجين من العظام الخارجية، إعادة توزيع الأحمال عبر الجسم. يا متخصصو الروبوتات، ما رأيكم في هذا المفهوم الثوري؟
Comments are closed.